This was our entry to the 2009 GISRUK mashup challenge.
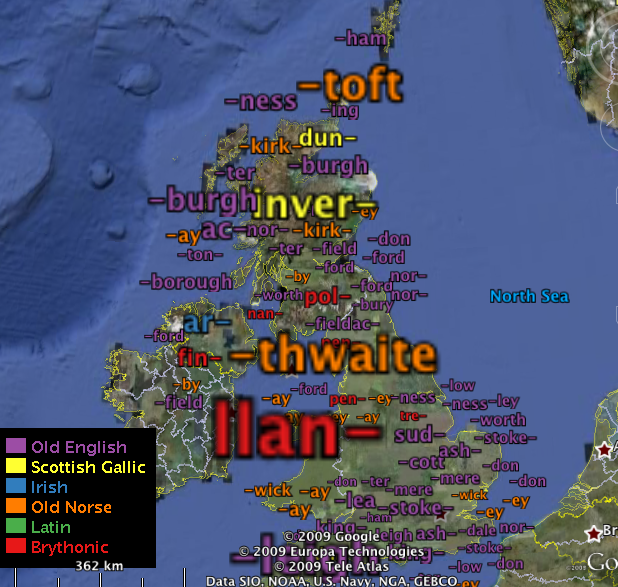
Cluttered pushpin maps are often the result of mashups based on large point datasets, from which it is frequently difficult to detect spatial patterns. We demonstrate how server-generated density estimation surfaces, chi surfaces (expectation surfaces) and 'tag maps' may be more appropriate means to explore point datasets. We use a gazetteer of British placenames (~9000) - classified by generic form and linguistic origin - and Google Earth to illustrate this. The surfaces and tag maps are generated on a web server, on-demand and at a resolution appropriate for Google Earth's current zoom level. This allows patterns and relationships to be explored at different spatial scales.
Reasons why such spatial summarisation techniques are not more widely used include a lack of knowledge as to how to handle spatial data, lack of software tools to summarise the data on-demand and the high computation time that is often associated with this. Our mashup uses two prototype Java applications that run on our web server; one that retrieves and returns point data from a database and one that uses this output, generates the surfaces and returns a KMZ file. These are applications are accessed through standard HTTP requests (in which parameters including Google Earth's BBOX parameter are encoded) that return KMZ files. The worst-case computation time (all 9000 placenames, all surfaces and all tagmaps) is about 15 seconds, but this time is reduced significantly when fewer outputs are requested (e.g. only density surfaces) and when the query is geographically constrained. Code optimisation, precomputation and caching are strategies that will improve the computation time.
Four layers can be toggled - density surfaces and chi surfaces for each placename prefix/suffix and tag maps of both these. Use the timelines to explore the surfaces - in both cases they are arranged from max to min. The tag maps attempt to show all placename prefixes/suffixes concurrently.
You may also download a pdf version of this document.
This dataset is based on data from http://geonames.org/, classified by hand using http://en.wikipedia.org/wiki/List_of_generic_forms_in_British_place_names. Only those places names which could be classified with a generic form are present. As such, this is probably an incomplete dataset and is used to illustrative purposes.
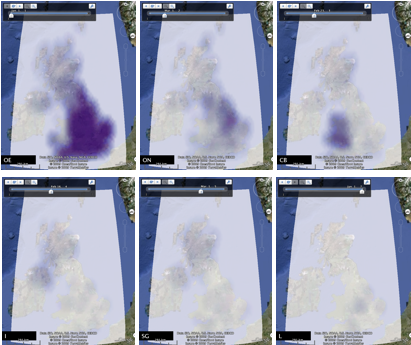
Figure 1: Density surfaces of settlement names with Old English, Old Norse, Brythonic, Irish, Scottish Gallic and Latin origin, from left to right in order of decreasing maximum local density, with identical colour scaling.
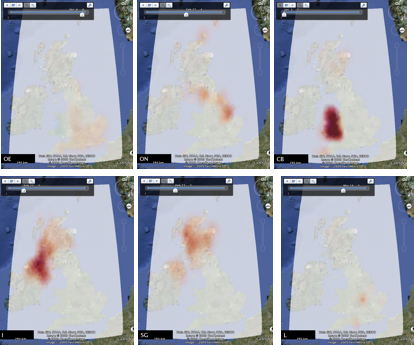
Figure 2: Chi expectation surfaces where red indicates a higher than 'expected' local concentration of settlements with the specific linguistic origin. Note that a symmetrical diverging colour scale is used and that all negative values are too low to be strongly coloured.
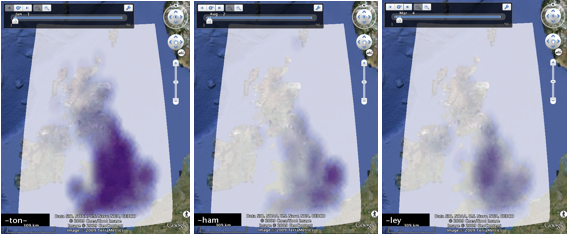
Figure 3: Density surfaces of the top three placename forms when a common colour scheme is applied to the three surfaces.
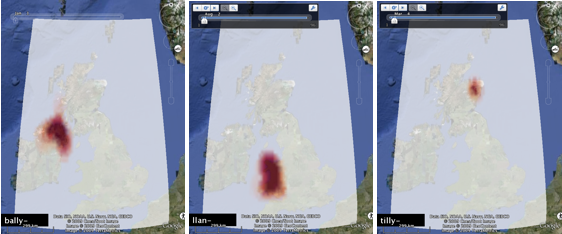
Figure 4: Chi expectation surfaces of the three placename forms with the highest maximum local deviation from expectation, using a common diverging colour scheme for all three surfaces.
Figures 3 and 4 show density and chi surfaces ordered by maximum value (the top three are shown - note these top three are different). These are ordered using the Google Earth timeline slider, which along with the Places panel, gives access to any individual surface. In all cases, the surfaces and tag maps are based on 100x100 rasters for the current field of view, with a 10x10 kernel with an inverse-distanced weighted function (Cressman).
An obvious drawback of these surfaces is that only one variable can be shown at once. In figure 5, we show multiple placename forms concurrently using a tag map - a spatial version of a tag cloud - where words are sized by their local prominence. Prominence can be measured using absolute counts or the chi value - note that these give very different spatial patterns. Words are placed at local maxima in the density and chi surfaces, and sized by the value. In figure 6, the tag maps have been constrained to the Google Earth viewing area based on density surfaces at a larger scale, again based on 100x100 rasters for the area shown.
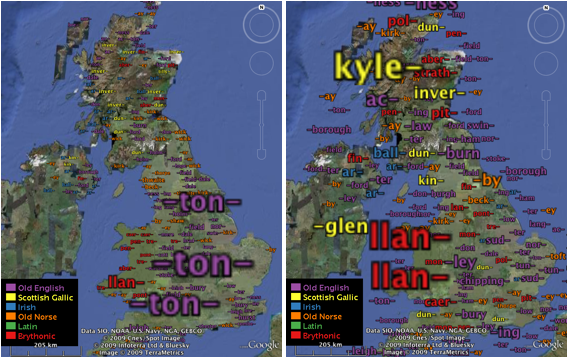
Figure 5: Tag maps of placement forms. Left: words are size by their local (absolute) density. Right: words are sized by their local deviation from expected.
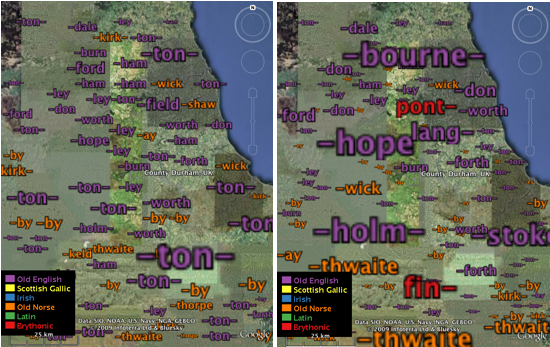
Figure 6: Tag maps as above, but computed for the North East, centred on Durham.
Here, we illustrate how mashups based on point data may benefit from using appropriate scale-dependent summarisation techniques. Our prototype shows one way that this might be implemented, perhaps as a web-service for use in other mashups.
There are a number of issues with these graphics, including:
Some of these issues are described in the references (below).
Wood, J, Dykes, J., Slingsby, A. and Clarke K. 2007. Interactive visual exploration of a large spatio-temporal data set: reflections on a geovisualization mashup. IEEE Transactions on Visualization and Computer Graphics 13 (6), pp1176-1183, November/December 2007. [pdf]
Slingsby, A., Dykes, J., Wood, J. and Clarke, K. 2007. Mashup cartography: cartographic issues of using Google Earth for tag maps. ICA Commission on Maps and the Internet, July/August 2007, Warsaw, Poland. pp79-93. [pdf]
Slingsby, A., Dykes, J., Wood, J. and Clarke, K. 2007. Interactive Tag Maps and Tag Clouds for the Multiscale Exploration of Large spatiotemporal Datasets, 11th International Conference on Information Visualisation. July 2007. Zurich, Switzerland. pp497-504 [pdf]
Please contact Aidan Slingsby for more information.