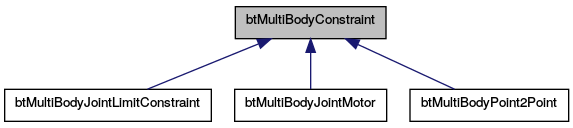
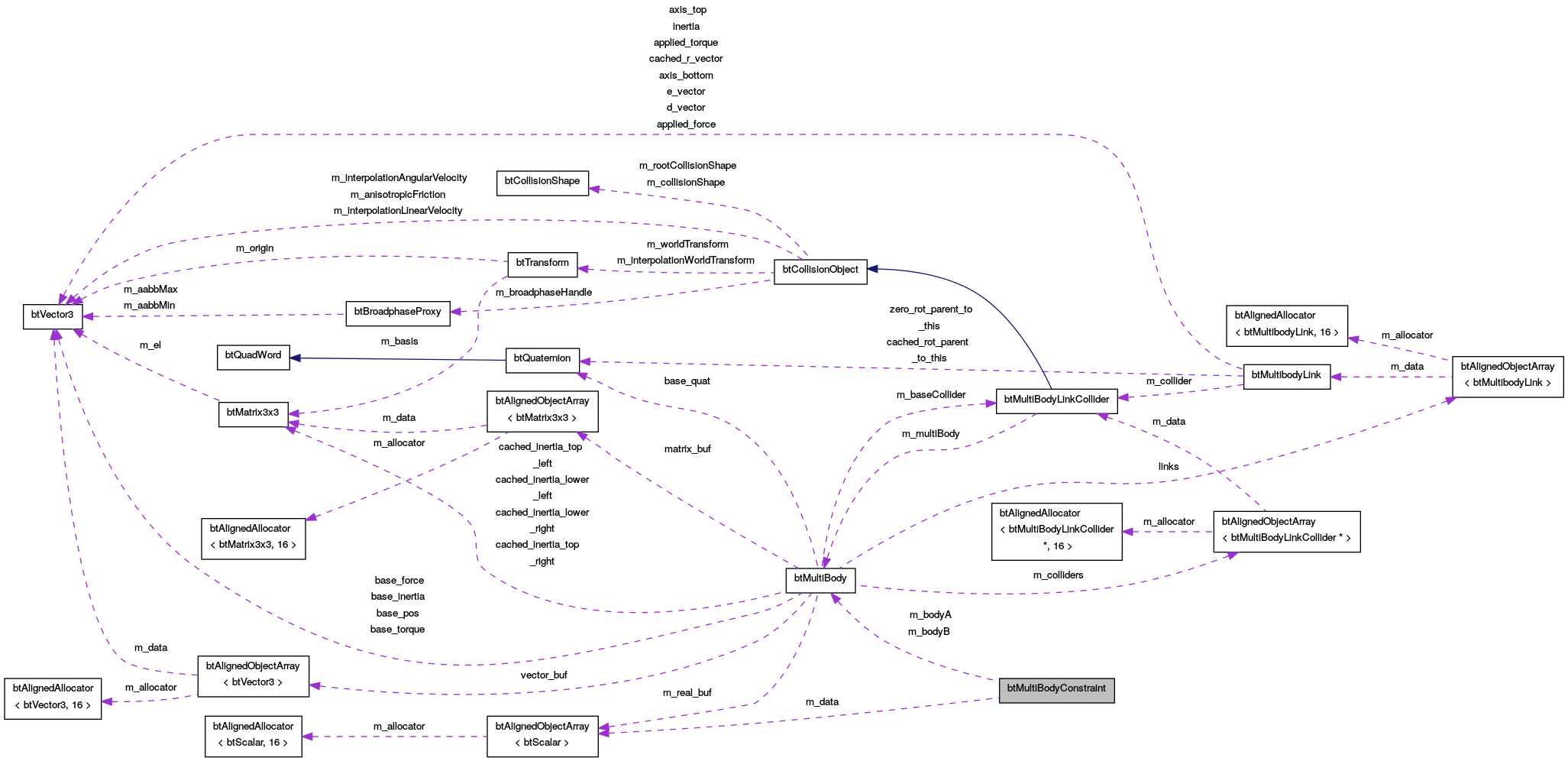
#include <btMultiBodyConstraint.h>
|
| void | applyDeltaVee (btMultiBodyJacobianData &data, btScalar *delta_vee, btScalar impulse, int velocityIndex, int ndof) |
| |
| void | fillMultiBodyConstraintMixed (btMultiBodySolverConstraint &solverConstraint, btMultiBodyJacobianData &data, const btVector3 &contactNormalOnB, const btVector3 &posAworld, const btVector3 &posBworld, btScalar position, const btContactSolverInfo &infoGlobal, btScalar &relaxation, bool isFriction, btScalar desiredVelocity=0, btScalar cfmSlip=0) |
| |
| btScalar | fillConstraintRowMultiBodyMultiBody (btMultiBodySolverConstraint &constraintRow, btMultiBodyJacobianData &data, btScalar *jacOrgA, btScalar *jacOrgB, const btContactSolverInfo &infoGlobal, btScalar desiredVelocity, btScalar lowerLimit, btScalar upperLimit) |
| |
Definition at line 42 of file btMultiBodyConstraint.h.
| btMultiBodyConstraint::btMultiBodyConstraint |
( |
btMultiBody * |
bodyA, |
|
|
btMultiBody * |
bodyB, |
|
|
int |
linkA, |
|
|
int |
linkB, |
|
|
int |
numRows, |
|
|
bool |
isUnilateral |
|
) |
| |
| btMultiBodyConstraint::~btMultiBodyConstraint |
( |
| ) |
|
|
virtual |
| void btMultiBodyConstraint::fillMultiBodyConstraintMixed |
( |
btMultiBodySolverConstraint & |
solverConstraint, |
|
|
btMultiBodyJacobianData & |
data, |
|
|
const btVector3 & |
contactNormalOnB, |
|
|
const btVector3 & |
posAworld, |
|
|
const btVector3 & |
posBworld, |
|
|
btScalar |
position, |
|
|
const btContactSolverInfo & |
infoGlobal, |
|
|
btScalar & |
relaxation, |
|
|
bool |
isFriction, |
|
|
btScalar |
desiredVelocity = 0, |
|
|
btScalar |
cfmSlip = 0 |
|
) |
| |
|
protected |
| virtual int btMultiBodyConstraint::getIslandIdA |
( |
| ) |
const |
|
pure virtual |
| virtual int btMultiBodyConstraint::getIslandIdB |
( |
| ) |
const |
|
pure virtual |
| btScalar btMultiBodyConstraint::getMaxAppliedImpulse |
( |
| ) |
const |
|
inline |
| int btMultiBodyConstraint::getNumRows |
( |
| ) |
const |
|
inline |
| btScalar btMultiBodyConstraint::getPosition |
( |
int |
row | ) |
const |
|
inline |
| bool btMultiBodyConstraint::isUnilateral |
( |
| ) |
const |
|
inline |
| btScalar* btMultiBodyConstraint::jacobianA |
( |
int |
row | ) |
|
|
inline |
| const btScalar* btMultiBodyConstraint::jacobianA |
( |
int |
row | ) |
const |
|
inline |
| btScalar* btMultiBodyConstraint::jacobianB |
( |
int |
row | ) |
|
|
inline |
| const btScalar* btMultiBodyConstraint::jacobianB |
( |
int |
row | ) |
const |
|
inline |
| void btMultiBodyConstraint::setMaxAppliedImpulse |
( |
btScalar |
maxImp | ) |
|
|
inline |
| void btMultiBodyConstraint::setPosition |
( |
int |
row, |
|
|
btScalar |
pos |
|
) |
| |
|
inline |
| bool btMultiBodyConstraint::m_isUnilateral |
|
protected |
| int btMultiBodyConstraint::m_jac_size_A |
|
protected |
| int btMultiBodyConstraint::m_jac_size_both |
|
protected |
| int btMultiBodyConstraint::m_linkA |
|
protected |
| int btMultiBodyConstraint::m_linkB |
|
protected |
| btScalar btMultiBodyConstraint::m_maxAppliedImpulse |
|
protected |
| int btMultiBodyConstraint::m_num_rows |
|
protected |
| int btMultiBodyConstraint::m_pos_offset |
|
protected |
The documentation for this class was generated from the following files: